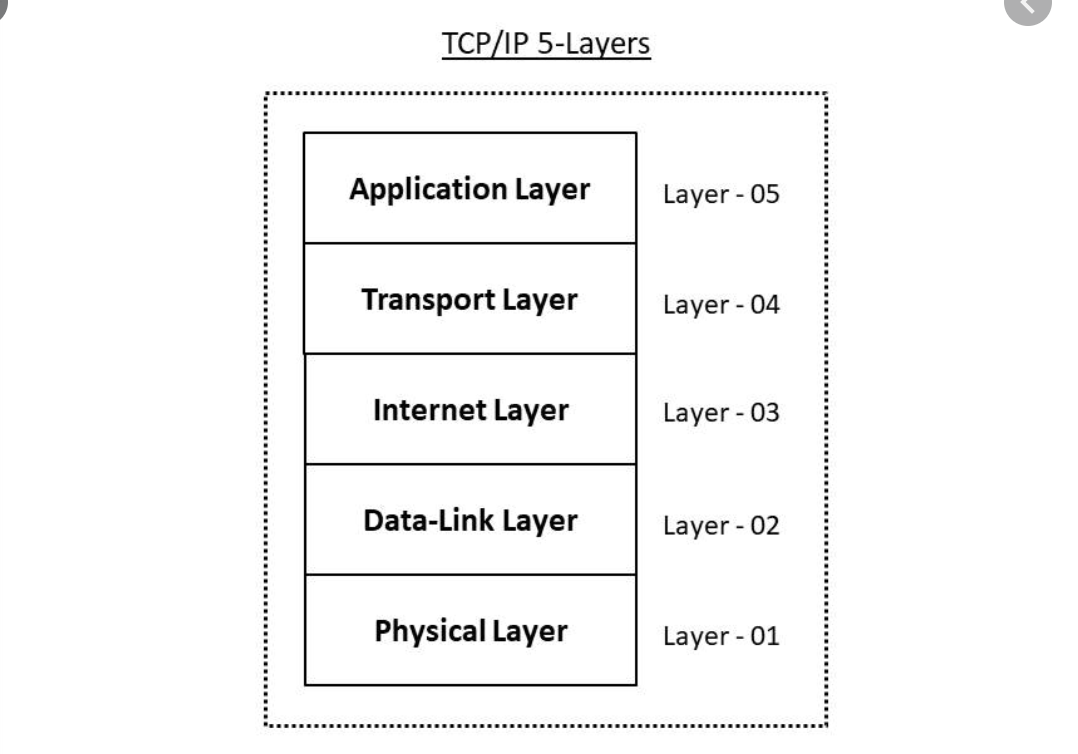
A reference of the 5 layer networking model (analogy purposes)
A reference of the 5 layer networking model (analogy purposes)
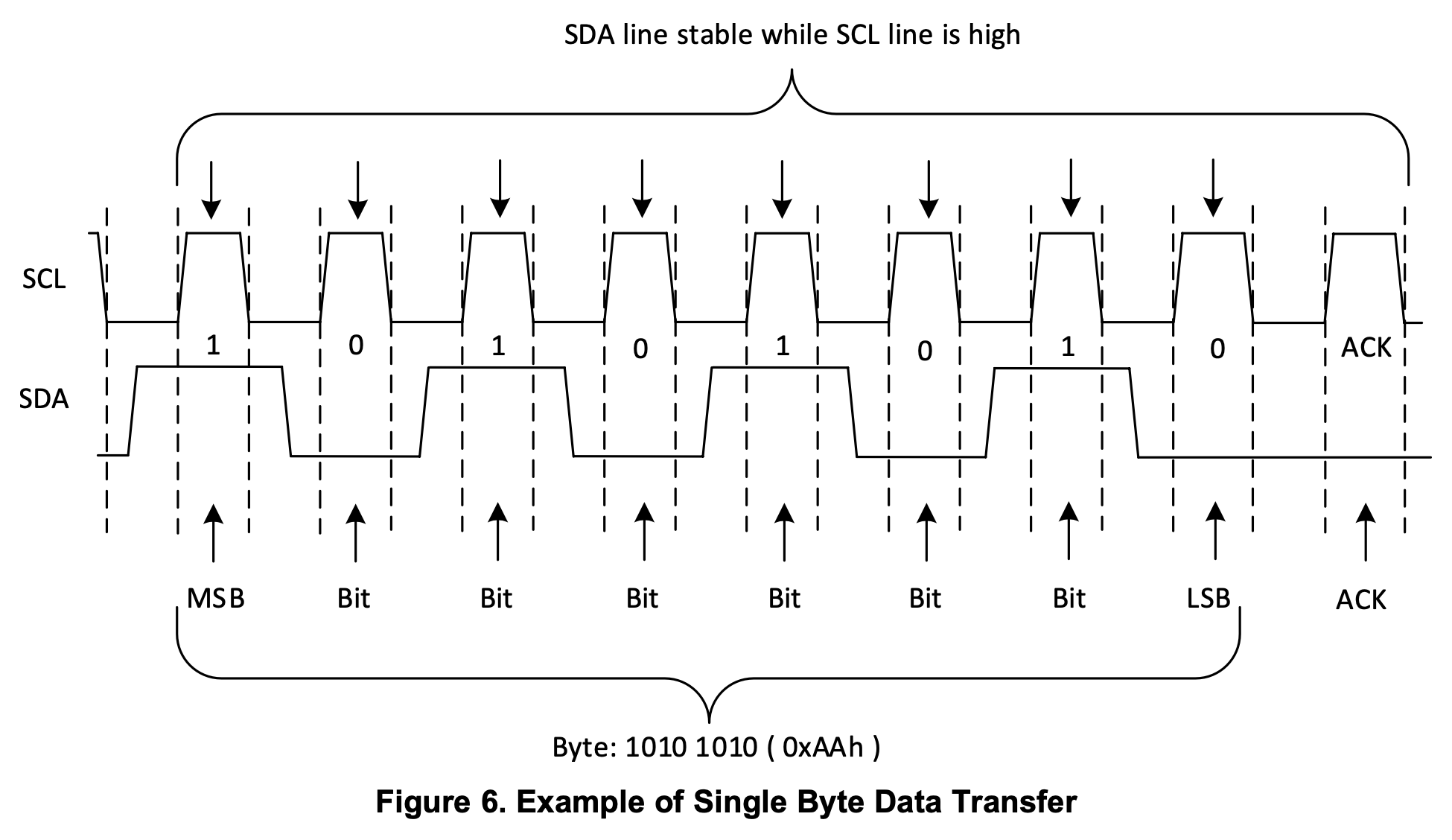
From TI I2C documentation, pg. 4
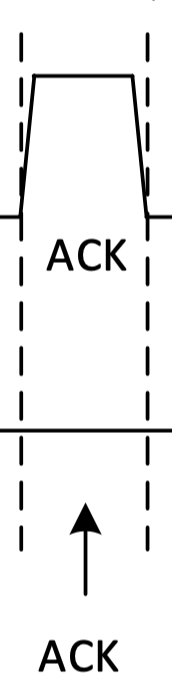
Example of an ACK
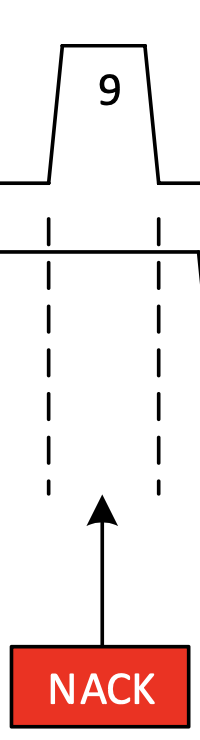
Example of NACK
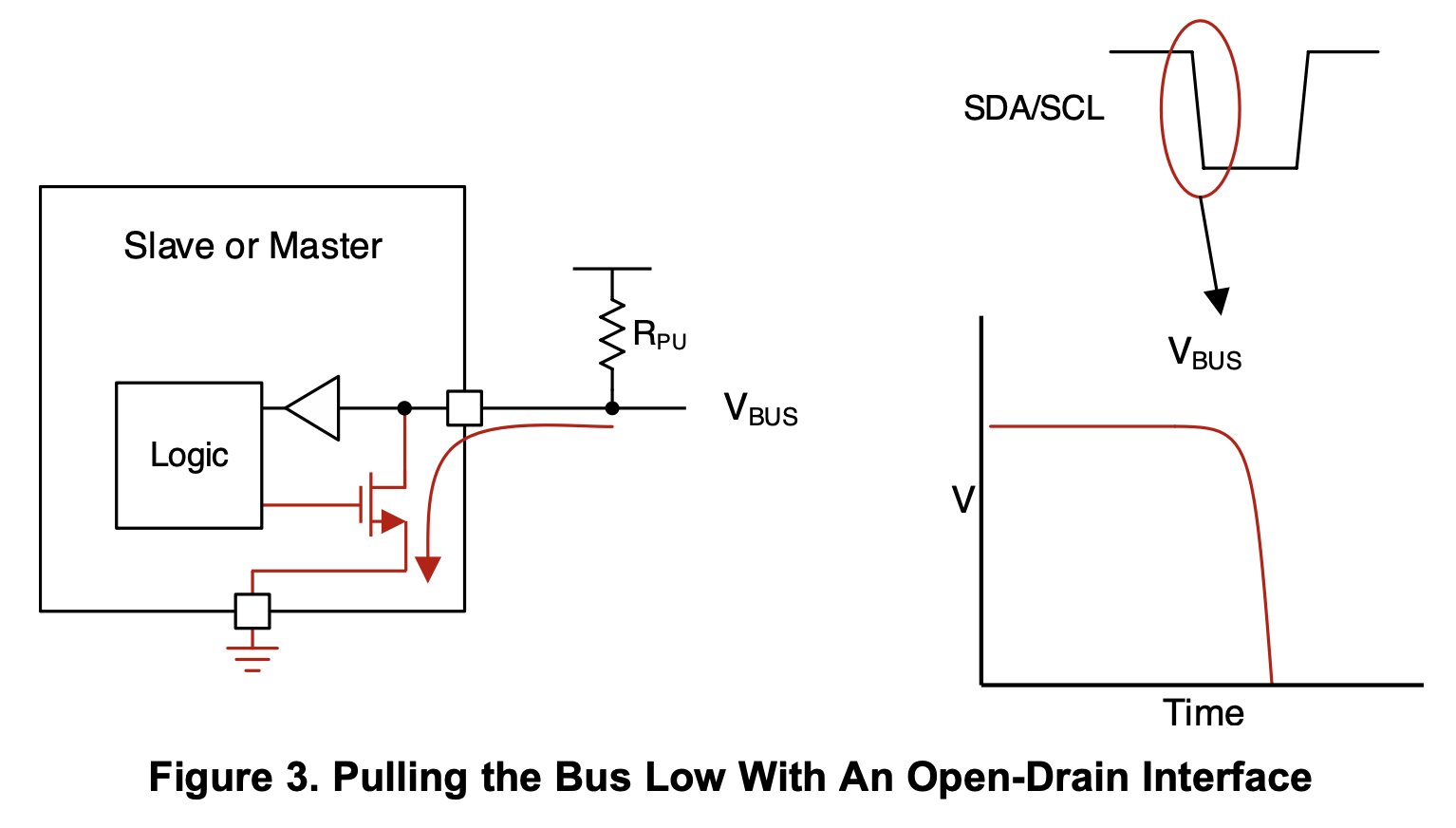
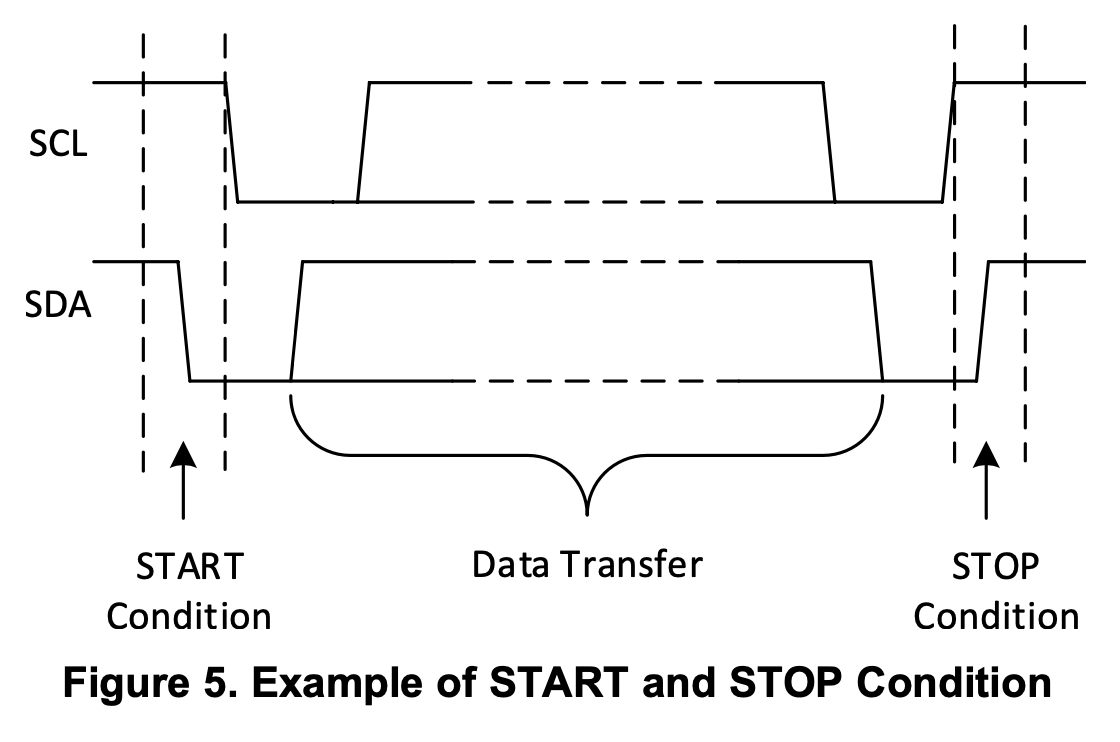
From TI I2C documentation, pg. 4
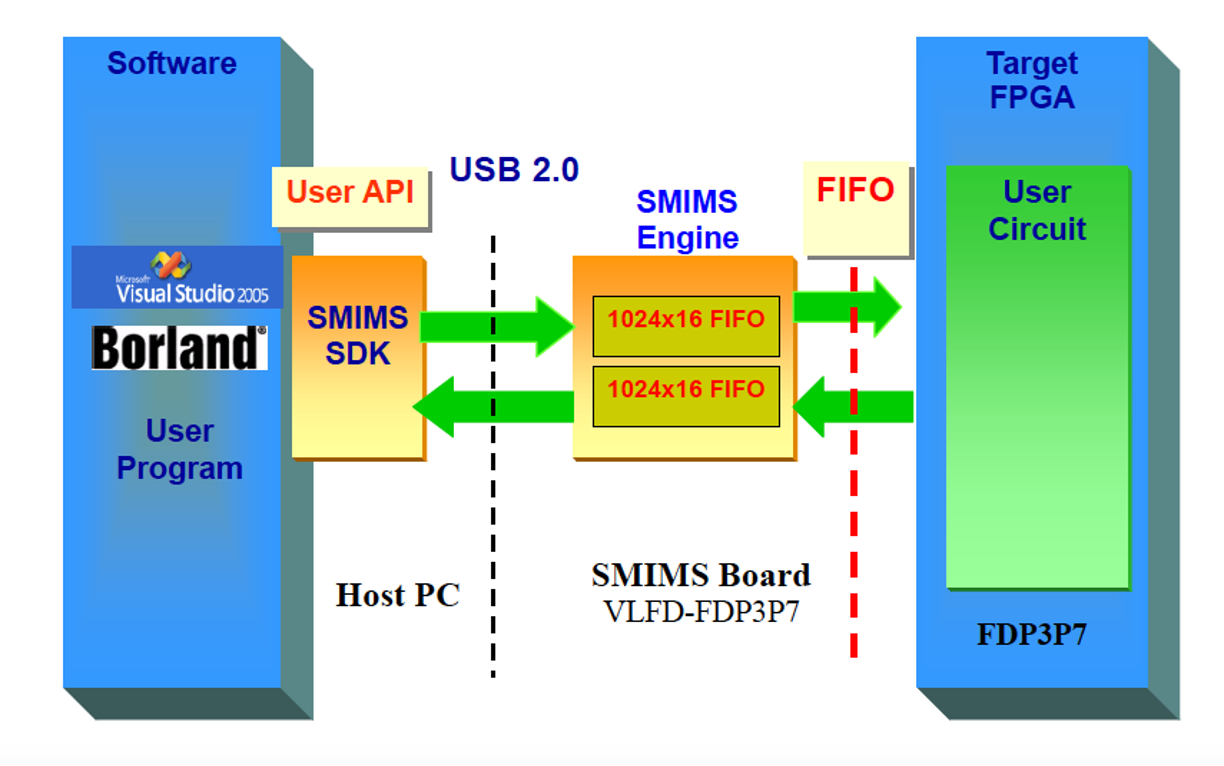
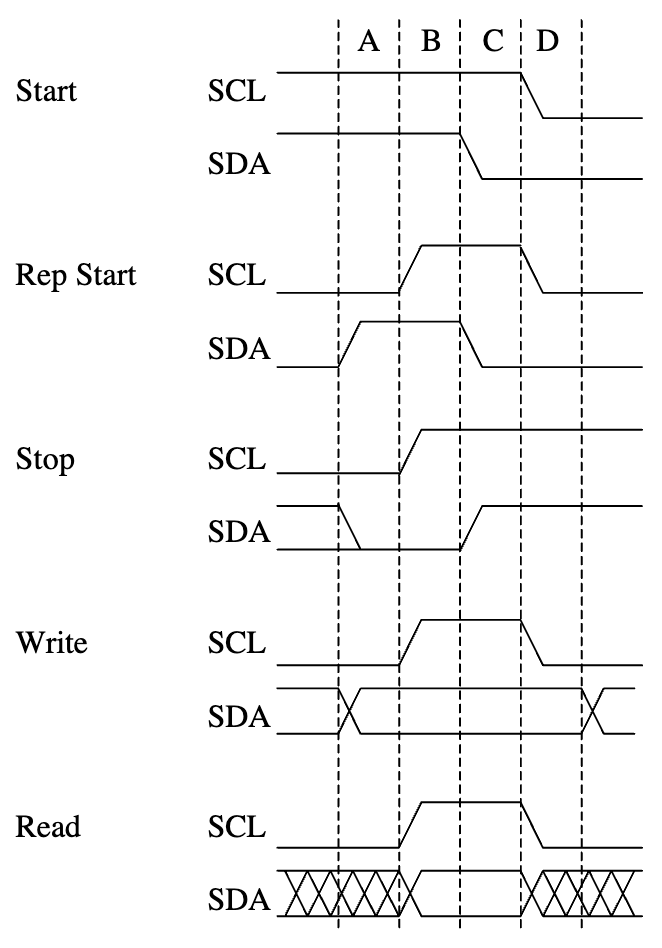
From OpenCores reference, pg. 15
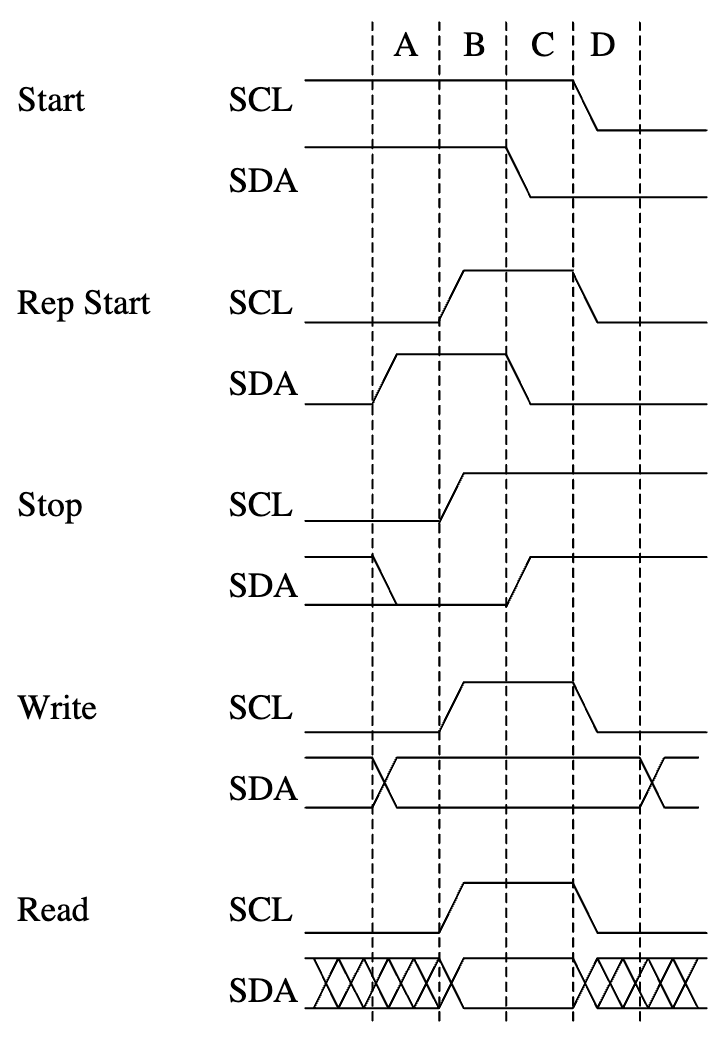
Each operation split into ⅘ signal level operations
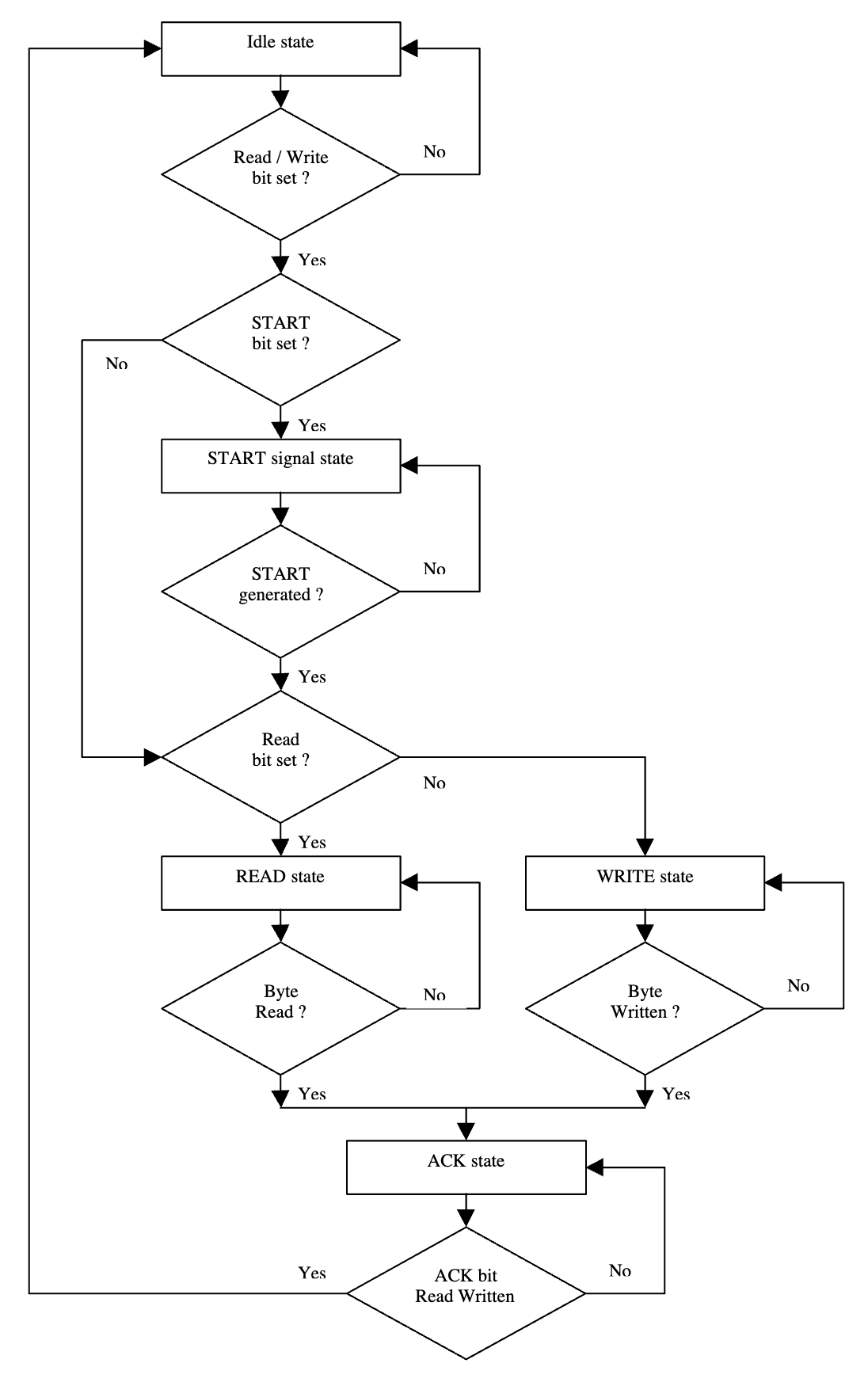
FSM flow chart